

Un robot humanoïde coréen exécute une danse K-POP virale apprise en regardant des vidéos
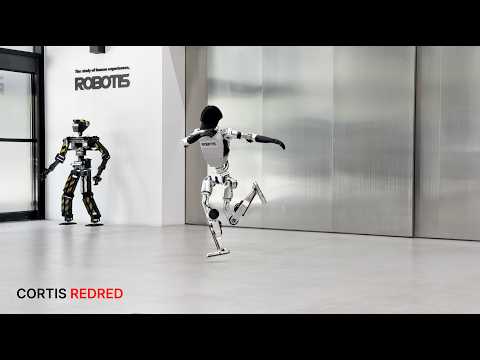
ROBOTIS, fabricant coréen de composants et plateformes robotiques, a publié début juin 2026 une démonstration de son humanoïde AI Sapiens reproduisant le "CORTIS REDRED Challenge", une chorégraphie K-POP virale, à partir d'une unique vidéo captée sur smartphone. La chaîne de traitement repose sur quatre étapes enchaînées : capture de mouvement vidéo, retargeting cinématique vers la morphologie du robot, entraînement par apprentissage par renforcement en simulation, puis transfert Sim2Real vers le matériel physique. Aucun système de motion capture professionnel (OptiTrack, Vicon) n'a été utilisé. AI Sapiens mesure 1,3 mètre pour 34 kilogrammes, dispose de 23 degrés de liberté assurés par 23 actionneurs DYNAMIXEL-Q quasi-direct-drive (14 QM-060 et 9 QM-080), et embarque un NVIDIA Jetson Orin NX 16 Go offrant jusqu'à 100 TOPS de puissance de calcul. L'alimentation est assurée par une batterie 46,8 V, 9 000 mAh. ROBOTIS prévoit de publier l'intégralité du pipeline en open-source, incluant les fichiers CAD, le code source, les assets de simulation et les tutoriels.
Ce qui mérite attention, ce n'est pas la danse en elle-même -- les vidéos de robots qui dansent sont devenues un genre communicationnel à part entière -- mais la suppression du goulot d'étranglement de la collecte de données de mouvement. Jusqu'ici, entraîner un humanoïde sur des mouvements complexes requérait des studios de capture équipés et des techniciens spécialisés, coûts prohibitifs pour les équipes de recherche et les PME industrielles. Substituer cela à une vidéo smartphone abaisse drastiquement la barrière d'entrée pour la production de comportements moteurs variés. La démonstration valide aussi partiellement le pipeline Sim2Real comme suffisamment robuste pour des mouvements dynamiques à corps entier -- un point que beaucoup d'équipes considéraient encore fragile hors de contextes très contraints. Reste que la vidéo présente un mouvement expressif non critique : il faudra des preuves comparables sur des tâches à charge utile ou à contact riche pour juger de la généralisation réelle de la méthode.
ROBOTIS est une entreprise coréenne historiquement centrée sur les actionneurs Dynamixel, composants de référence dans la robotique académique mondiale depuis les années 2000. AI Sapiens constitue sa montée en gamme vers les plateformes humanoides complètes, en compétition directe avec des systèmes comme Unitree H1/G1 (Chine), Agility Robotics Digit (USA) ou Sanctuary AI Phoenix (Canada), tous également positionnés sur l'open-source partiel ou la recherche collaborative. Dans le paysage européen, des acteurs comme Enchanted Tools (Mirokaï, France) ou Wandercraft (exosquelette, Paris) restent sur des segments plus spécialisés. La publication open-source annoncée par ROBOTIS est un pari sur l'effet de communauté : si le pipeline se diffuse dans les labos universitaires, ROBOTIS consolide son écosystème Dynamixel comme standard de facto pour la prochaine génération d'humanoides de recherche. Aucune date de release précise n'a été communiquée à ce stade.
Les laboratoires de recherche européens utilisant des actionneurs Dynamixel (standard académique mondial) pourront potentiellement bénéficier de la publication open-source du pipeline vidéo-vers-mouvement, réduisant le coût d'entrée pour l'entraînement de comportements moteurs complexes sans équipement de capture de mouvement professionnel.
Dans nos dossiers



