
Accessibilité de Hamilton-Jacobi contrainte par variété pour planification de mouvement multi-agents décentralisée
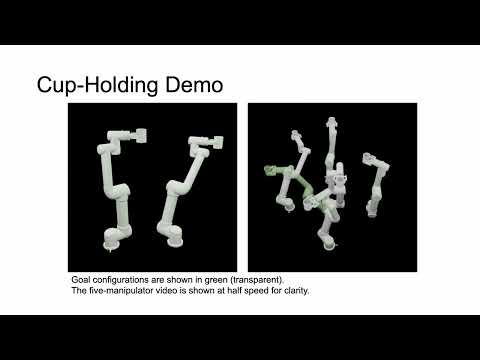
Des chercheurs en robotique publient une nouvelle version (v2) d'un article arXiv intitulé "Manifold-constrained Hamilton-Jacobi Reachability Learning for Decentralized Multi-Agent Motion Planning" (arXiv:2511.03591), qui propose une méthode pour planifier les mouvements de plusieurs robots de façon sûre et décentralisée tout en respectant des contraintes géométriques imposées par la tâche elle-même. L'exemple donné par les auteurs est celui d'un robot de service qui doit porter une tasse bien droite, sans la renverser, tout en évitant des collisions avec des humains ou d'autres robots présents dans la même zone. Pour résoudre ce problème, l'équipe combine l'apprentissage par accessibilité de Hamilton-Jacobi, une technique mathématique servant à calculer les zones qu'un système peut atteindre en toute sécurité, avec des contraintes dites de variété (manifold), qui formalisent les gestes ou postures que la tâche impose. Ce calcul de sécurité contrainte est ensuite intégré dans un planificateur de trajectoires décentralisé, c'est-à-dire que chaque robot planifie ses propres mouvements sans connaître à l'avance la stratégie des autres agents.
Pour l'industrie robotique, l'enjeu dépasse la simple prouesse académique: la plupart des planificateurs multi-agents actuels garantissent soit la sécurité, soit le respect d'une contrainte de tâche, rarement les deux simultanément à haute vitesse et en environnement dynamique. Une méthode capable de tenir les deux à la fois, tout en restant assez rapide pour un usage temps réel, intéresse directement les concepteurs de flottes de robots mobiles autonomes (AMR) en entrepôt, les fabricants de robots de service et les équipes qui développent des bras manipulateurs coopératifs, où un geste manqué ou une collision a un coût opérationnel direct.
L'article s'inscrit dans la lignée des travaux récents sur la planification de mouvement multi-agents décentralisée pour systèmes à haute dimension, un domaine qui peine historiquement à intégrer des contraintes de tâche complexes sans hypothèses fortes sur le comportement des autres agents. Les auteurs affirment que leur approche généralise à des tâches variées et passe à l'échelle sur des problèmes de manipulation multi-agents en haute dimension, en dépassant les planificateurs contraints existants sur des bancs d'essai internes, une performance à nuancer puisqu'elle repose sur des comparaisons choisies par l'équipe elle-même. Une démonstration vidéo accompagne la publication.
Dans nos dossiers



