

Apprentissage de dynamiques neuronales ODE adaptées au contexte pour le contrôle robotique adaptatif
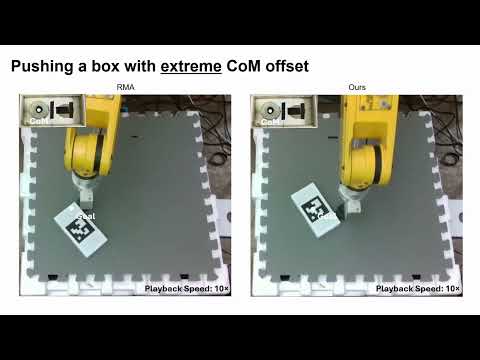
Des chercheurs ont proposé un modèle de dynamique contextuel fondé sur les équations différentielles ordinaires neuronales (Neural ODE) pour améliorer le contrôle de robots opérant dans des environnements incertains et variables. Le travail, déposé en juin 2026 sur arXiv (référence 2606.15469), cible les perturbations que les contrôleurs classiques peinent à absorber: variations des conditions de contact, effets aérodynamiques et perturbations externes imprévues. La méthode repose sur une procédure d'entraînement en deux phases: le modèle inspecte l'historique des états et des actions du robot pour inférer les facteurs environnementaux courants, sans capteurs dédiés supplémentaires. La compatibilité avec le MPC (Model Predictive Control) est intégrée dès la conception. Les validations portent sur trois plateformes distinctes: un drone quadrirotor en simulation, un robot sphérique Sphero BOLT et un bras manipulateur industriel Fanuc, ces deux derniers testés en conditions réelles.
L'enjeu central est la dérive de modèle lors du déploiement: un robot calibré en laboratoire voit ses performances se dégrader dès que l'environnement change, que ce soit un sol différent, une charge variable ou des turbulences. Par rapport aux approches récurrentes classiques (LSTM, GRU), les Neural ODE présentent un avantage structurel: elles modélisent la dynamique en temps continu, ce qui améliore la cohérence physique et simplifie l'interface avec les solveurs MPC. L'inférence du contexte depuis le seul historique actions-états, sans instrumentation additionnelle, réduit la barrière d'intégration pour les industriels. Le test sur un Fanuc, bras omniprésent en production manufacturière, ancre les résultats dans une réalité opérationnelle tangible. Point de réserve: l'article est un preprint et l'abstract ne publie aucune métrique chiffrée de performance, ce qui rend l'évaluation indépendante difficile à ce stade.
Les Neural ODE ont été introduites en 2018 par Chen et al. (NeurIPS) comme alternative aux réseaux récurrents pour modéliser des systèmes dynamiques continus. Leur application au contrôle robotique adaptatif répond à un obstacle persistant du secteur: le sim-to-real gap, qui fragilise la fiabilité des systèmes autonomes hors conditions contrôlées. Les approches concurrentes comprennent les processus gaussiens (GP) pour l'adaptation en ligne, les algorithmes méta-apprenants (MAML, PEARL) et l'identification de systèmes en temps réel. Ce travail se distingue par l'inférence contextuelle implicite, couplée nativement au MPC plutôt qu'ajoutée en couche. Le code source est ouvert sur GitHub et des démonstrations vidéo sont accessibles. La prochaine étape logique serait une validation sur des tâches de manipulation à charge variable ou un déploiement en environnement industriel non contrôlé.
Dans nos dossiers



