

Exploration planétaire en faible gravité par apprentissage par renforcement : marche, saut et contrôle d'attitude en vol
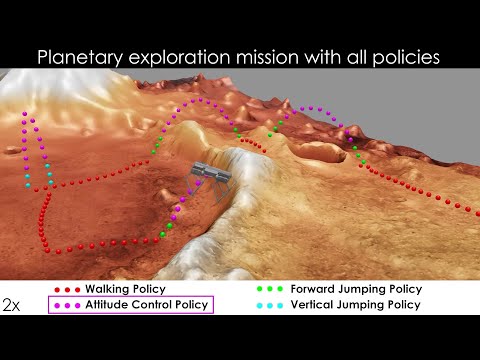
Des chercheurs ont publié sur arXiv (ref. 2605.24643) un ensemble de politiques d'apprentissage par renforcement conçues pour la locomotion quadrupède dans des conditions de gravité martienne (soit environ 3,72 m/s², contre 9,81 sur Terre). Le robot cible, baptisé Olympus, repose sur une architecture de jambes à mécanisme cinq-barres optimisée pour les sauts dynamiques. Les politiques entraînées couvrent quatre comportements : marche, saut vertical, saut horizontal et contrôle d'attitude en vol. Les résultats annoncés indiquent des sauts verticaux de 3,1 mètres et des sauts horizontaux de 3,9 mètres en simulation, ainsi qu'une réorientation angulaire de 90° en 2,6 secondes, ce dernier résultat ayant été validé sur le robot physique via un test mono-axe. Les politiques de locomotion (marche et saut) restent, elles, exclusivement validées en simulation à ce stade.
Ce travail est notable car il aborde un verrou concret de l'exploration planétaire : les rovers à roues actuels (Curiosity, Perseverance) ne peuvent franchir que des obstacles inférieurs à quelques dizaines de centimètres, là où un robot sauteur pourrait en théorie enjamber des blocs de plusieurs mètres. La combinaison saut + reorientation en vol pour des atterrissages contrôlés est une nouveauté architecturale sur quadrupède. Il faut toutefois noter que la majorité des métriques présentées proviennent de simulation, et le gap sim-to-real pour les dynamiques de saut complet reste non résolu expérimentalement, ce que les auteurs reconnaissent explicitement.
Dans le paysage de la robotique legged appliquée à l'espace, ce travail s'inscrit dans la continuité des recherches d'ETH Zürich sur ANYmal et des travaux du JPL/NASA sur des concepts de robots sauteurs lunaires. Côté industrie, Boston Dynamics et Unitree fournissent les plateformes quadrupèdes de référence pour la recherche académique, mais aucun d'eux n'est explicitement dimensionné pour la faible gravité. L'ESA et la NASA financent activement des études sur les robots à pattes pour les missions post-2030 sur la Lune et Mars. Les prochaines étapes logiques pour cette équipe sont la validation hardware des politiques de locomotion et de saut complet, et l'évaluation sur terrain analogique (lits de sable, rochers simulés), sans timeline annoncée à ce jour.
Ces travaux s'inscrivent dans le périmètre de financement actif de l'ESA pour les robots à pattes dans les missions lunaires et martiennes post-2030, sans application industrielle immédiate pour l'Europe.
Dans nos dossiers



