

Planification de mouvement en corps entier et contrôle à sécurité critique pour la manipulation aérienne
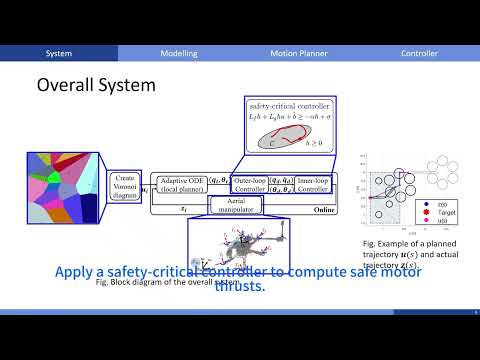
Une équipe de chercheurs propose sur arXiv (2511.02342v3) un cadre de planification de mouvement corps entier pour manipulateurs aériens : des drones multirotors équipés de bras robotiques conçus pour opérer dans des espaces encombrés. Le système repose sur une représentation par superquadriques (SQ), surfaces paramétriques différentiables qui modélisent avec précision la géométrie du véhicule, du bras embarqué et des obstacles environnants. Un planificateur à clairance maximale fusionne diagrammes de Voronoï et formulation de variété d'équilibre pour générer des trajectoires lisses, tandis qu'un contrôleur de sécurité applique simultanément les limites de poussée et l'évitement de collision via des fonctions de barrière d'ordre supérieur (high-order CBFs). En simulation, l'approche surpasse les planificateurs par échantillonnage en vitesse, sécurité et fluidité ; des expériences sur une plateforme physique réelle confirment la cohérence des performances sim-to-real.
La manipulation aérienne bute depuis longtemps sur le conservatisme des abstractions géométriques classiques : boîtes englobantes et ellipsoïdes surestiment l'encombrement du système, imposent des déviations inutiles et ferment des passages pourtant praticables. Les superquadriques résolvent ce problème en modélisant les surfaces réelles avec une fidélité géométrique fine, sans le coût computationnel des maillages. Pour les intégrateurs et équipes R&D, cela se traduit par des cycles plus courts et la capacité d'opérer dans des espaces confinés, directement pertinents pour l'inspection de structures, la maintenance en hauteur ou l'intervention en zone difficile d'accès. La validation hardware distingue ce travail de nombreuses publications restées cantonnées à la simulation, et les garanties formelles des CBF d'ordre supérieur constituent un argument de poids pour des déploiements en environnements réels.
La manipulation aérienne est un champ de recherche actif depuis une décennie, motivé par l'inspection d'éoliennes, de pylônes et d'infrastructures inaccessibles aux robots terrestres. La représentation par superquadriques, issue des travaux de Barr dans les années 1980 et revisitée par la robotique de manipulation terrestre, gagne en traction pour les contextes où la précision géométrique est critique. Parmi les équipes actives sur des problèmes voisins figurent l'ETH Zurich (ASL), le LAAS-CNRS côté français, ainsi que plusieurs groupes nord-américains et asiatiques. Ce preprint ne mentionne aucun partenaire industriel ni horizon de déploiement commercial, ce qui le positionne comme une contribution académique fondamentale avec validation expérimentale.
Le LAAS-CNRS est explicitement cité parmi les équipes actives sur des problèmes voisins ; cette contribution pourrait alimenter les travaux européens sur la manipulation aérienne pour l'inspection d'infrastructures.
Dans nos dossiers



